×
模态框(Modal)标题
在这里添加一些文本
关闭
关闭
提交更改
取消
确定并提交
×
模态框(Modal)标题
×
期刊
文章
图表
检索
登录
智慧农业(中英文)
关于期刊
期刊介绍
编委会
出版范围
数据库收录
在线期刊
最新录用
当期目录
过刊浏览
下载排行
阅读排行
引用排行
按栏目浏览
专题文章
整期阅读
作者中心
在线投稿
投稿须知
稿件写作标准规范
版权协议
论文模板
收费标准
期刊订阅
联系我们
English
关于期刊
期刊介绍
编委会
出版范围
数据库收录
在线期刊
最新录用
当期目录
过刊浏览
下载排行
阅读排行
引用排行
按栏目浏览
专题文章
整期阅读
作者中心
在线投稿
投稿须知
稿件写作标准规范
版权协议
论文模板
收费标准
期刊订阅
联系我们
English
图/表 详细信息
激光除草机器人关键技术与展望
余忠义, 王洪宇, 何雄奎, 赵磊, 王媛媛, 孙海
智慧农业(中英文), DOI:
10.12133/j.smartag.SA202410031
图10
激光除草机器人执行结构系统
本文的其它图/表
表2
田间杂草定位技术分类及优缺点
图7
田间杂草识别主要技术
表1
田间杂草识别技术分类及优缺点
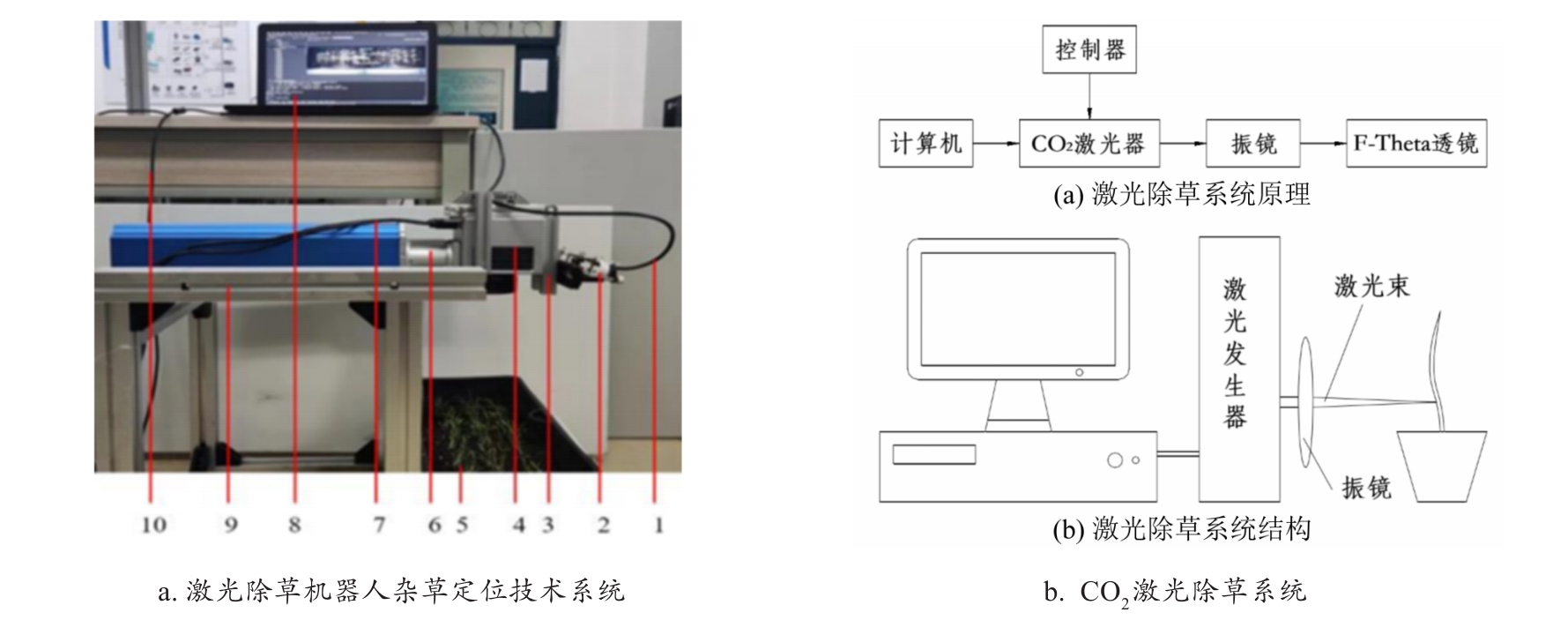
图8
激光除草机器人杂草定位技术系统
注:
1. 双目相机数据线;2. 双目相机;3. 相机支架;4. 激光振镜;5. 培养箱;6. 振镜连接光路;7. DB25激光振镜控制线;8. 计算机;9. 振镜支架;10. 激光振镜数据线。
图2
激光除草的作业原理
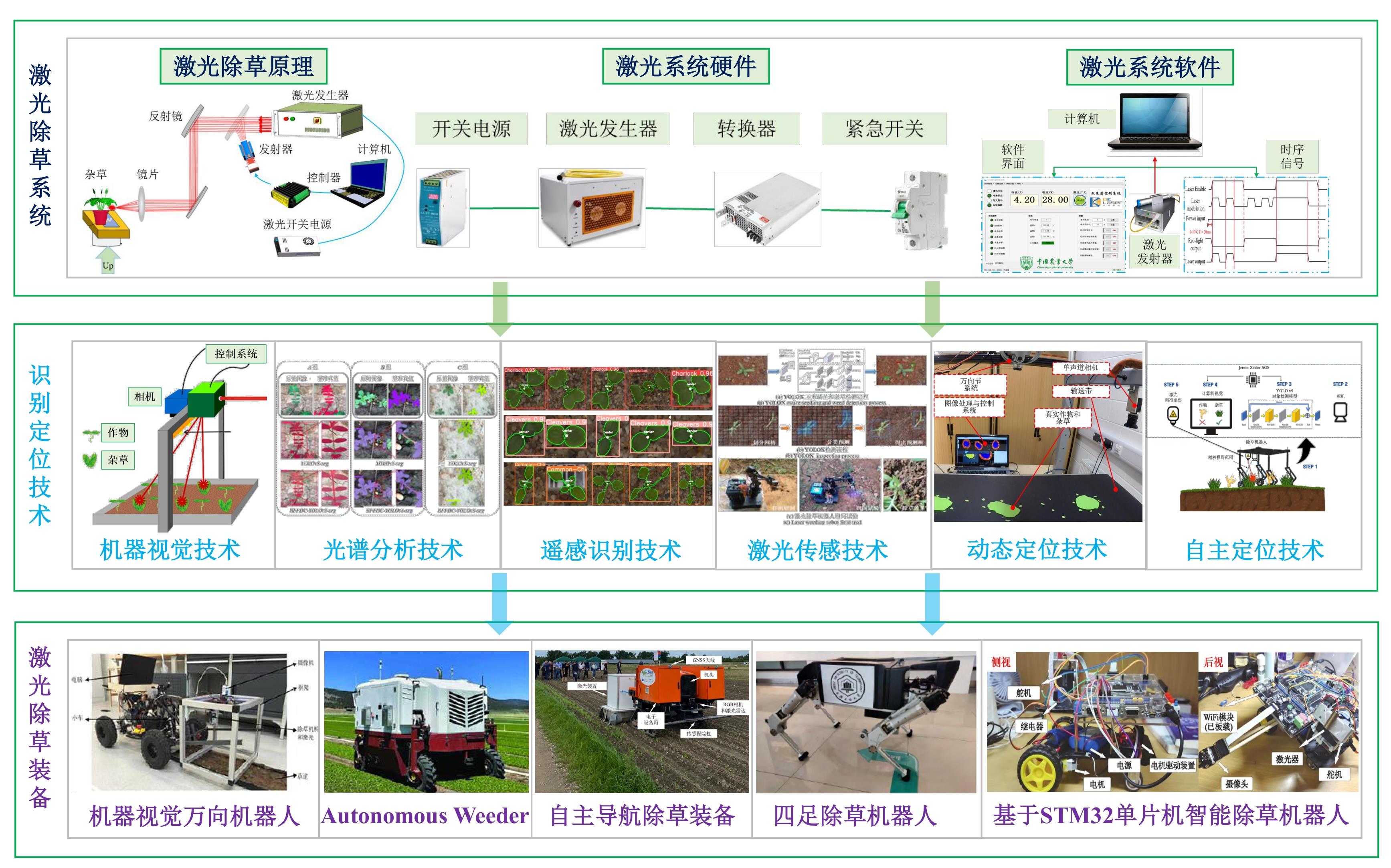
图3
激光除草关键技术和装备
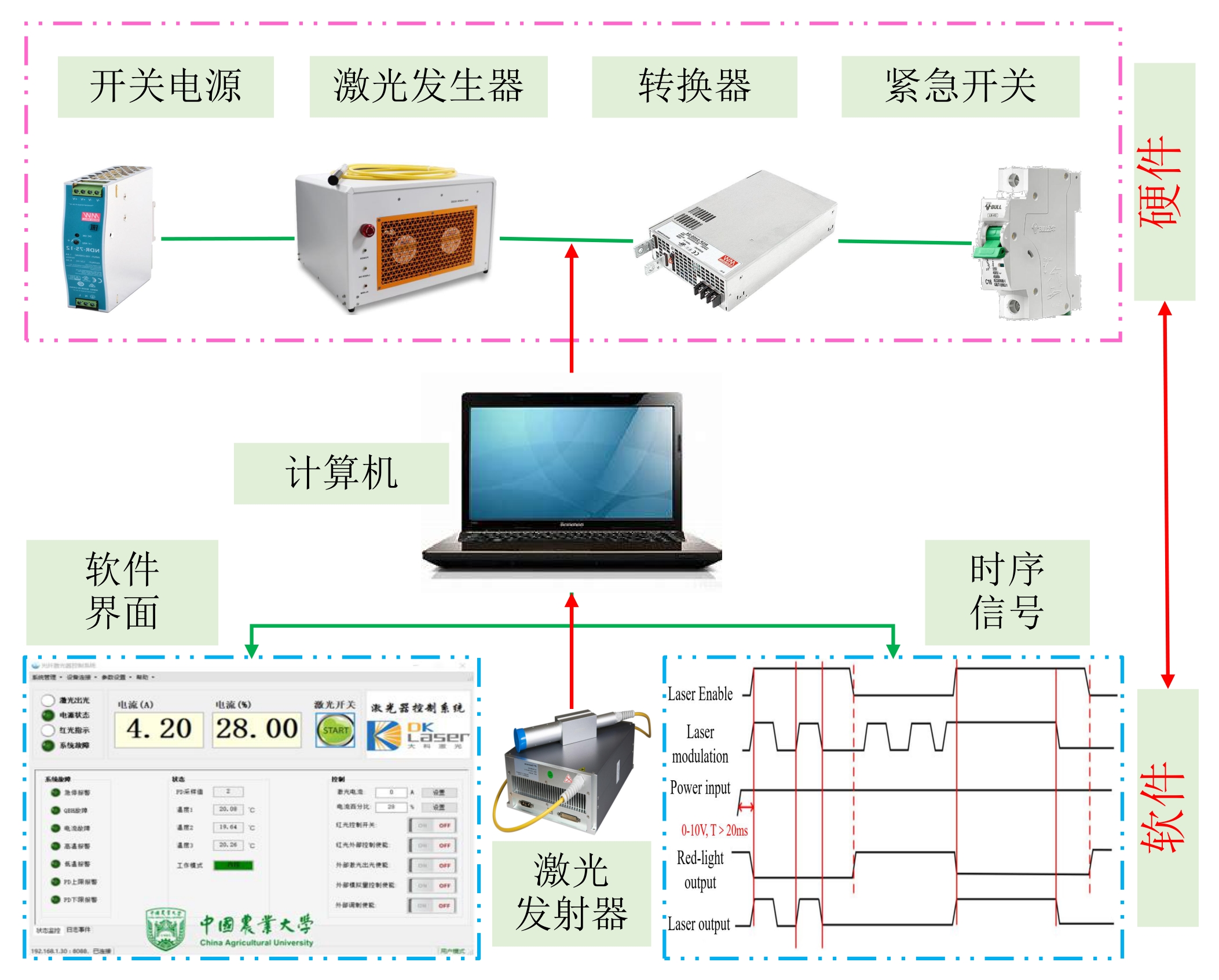
图4
激光除草作业系统
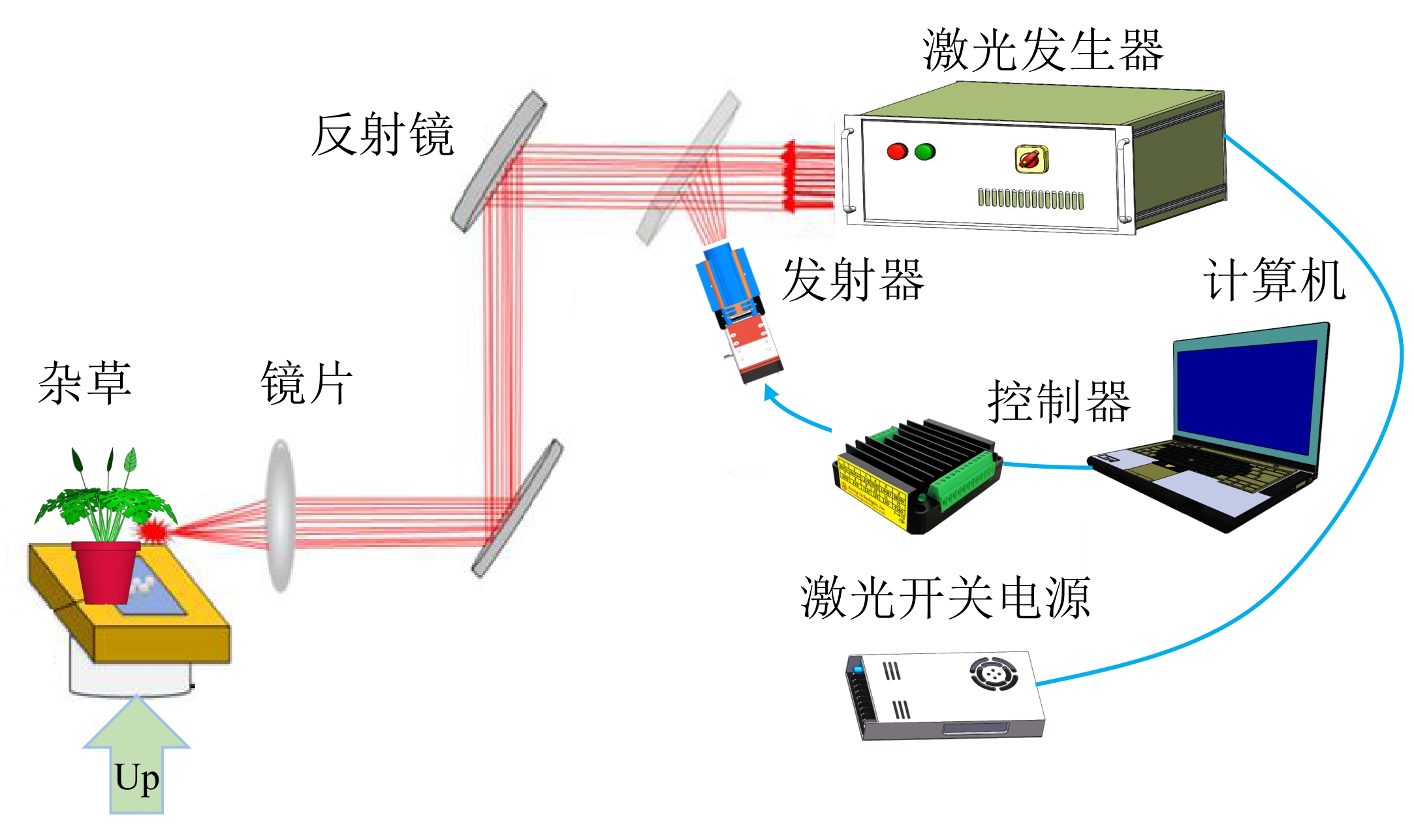
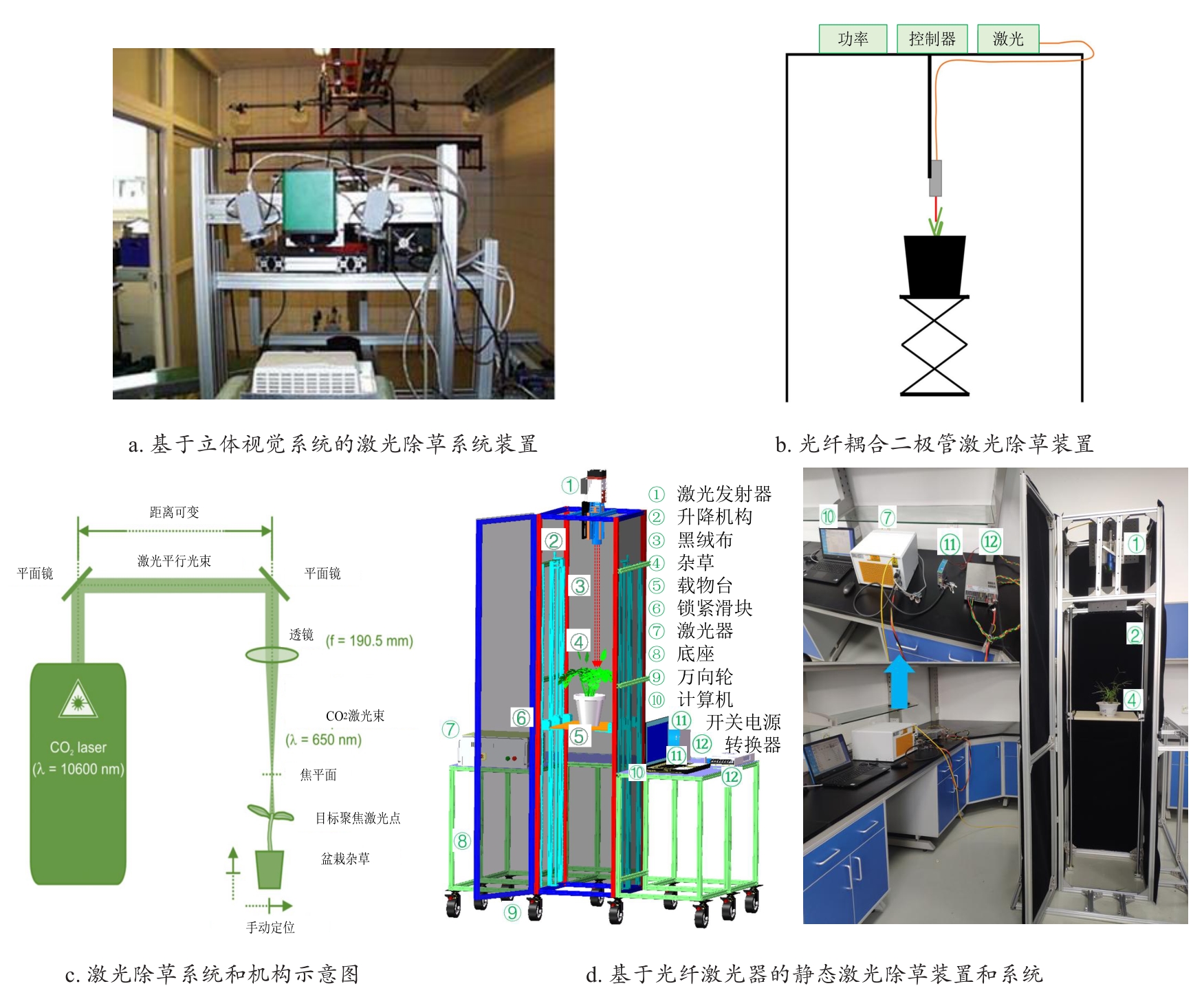
图5
新型激光除草系统装置
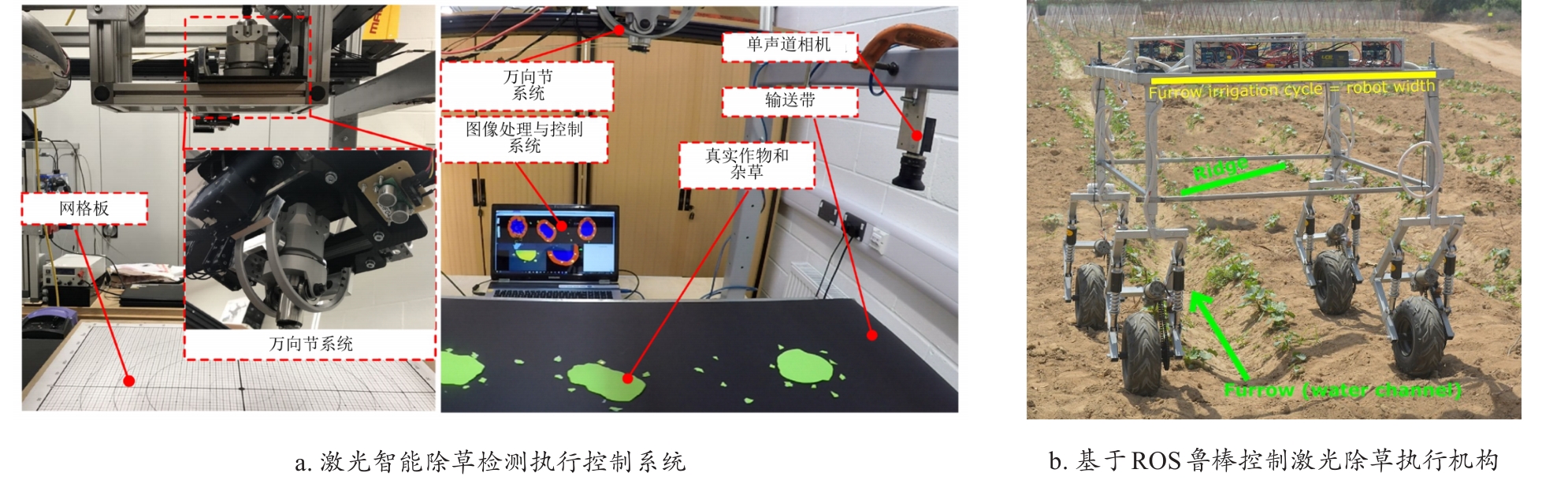
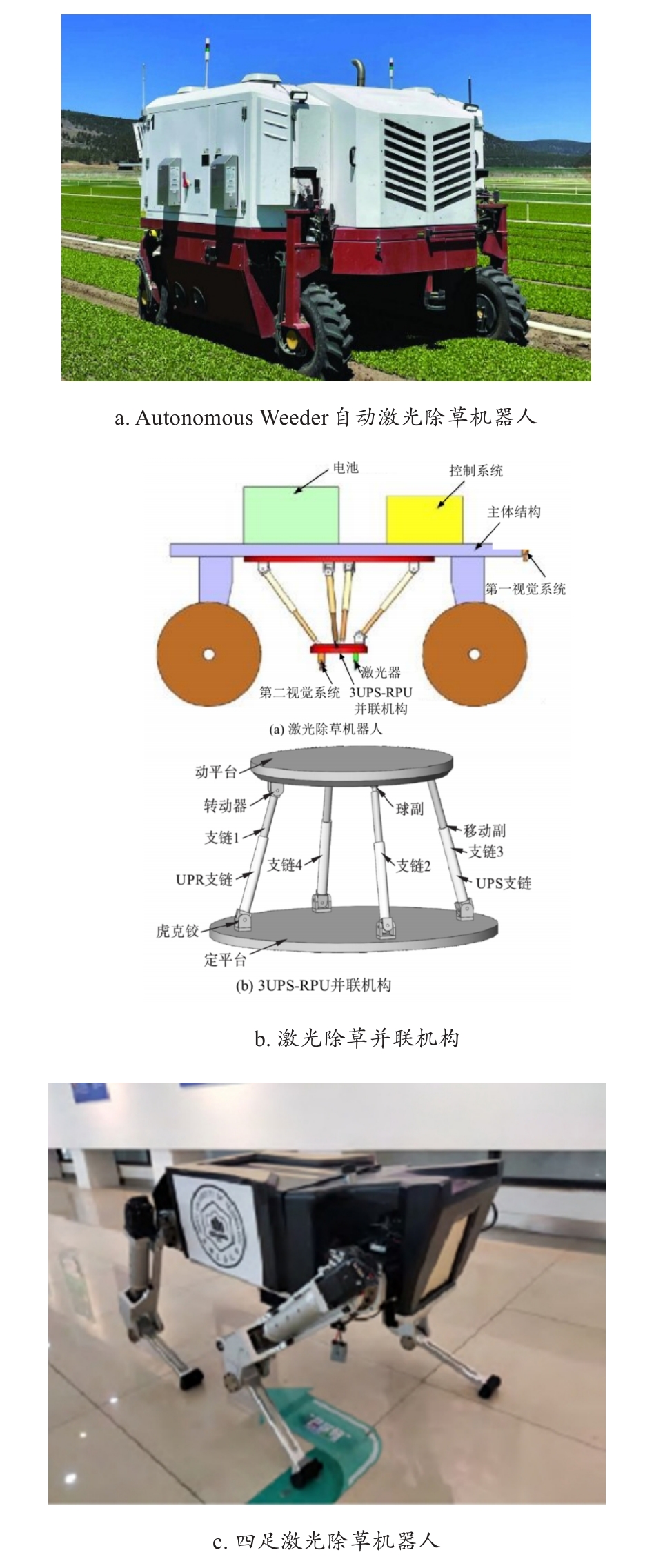
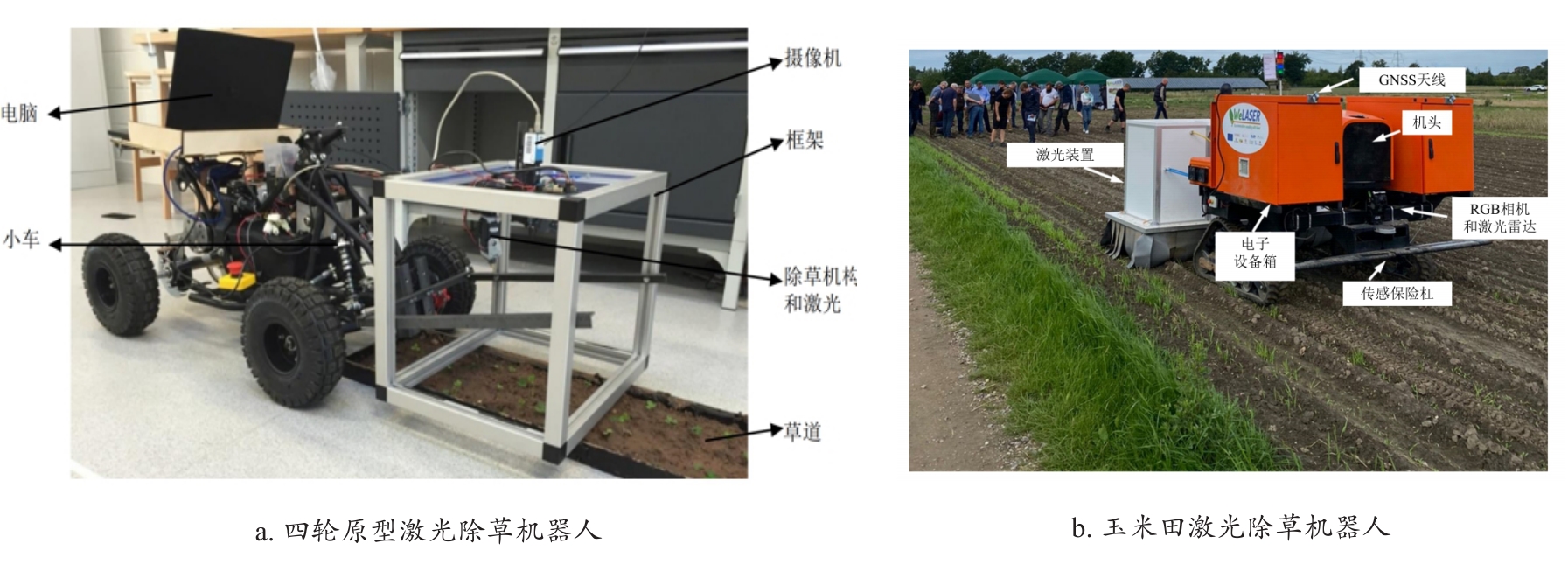
图11
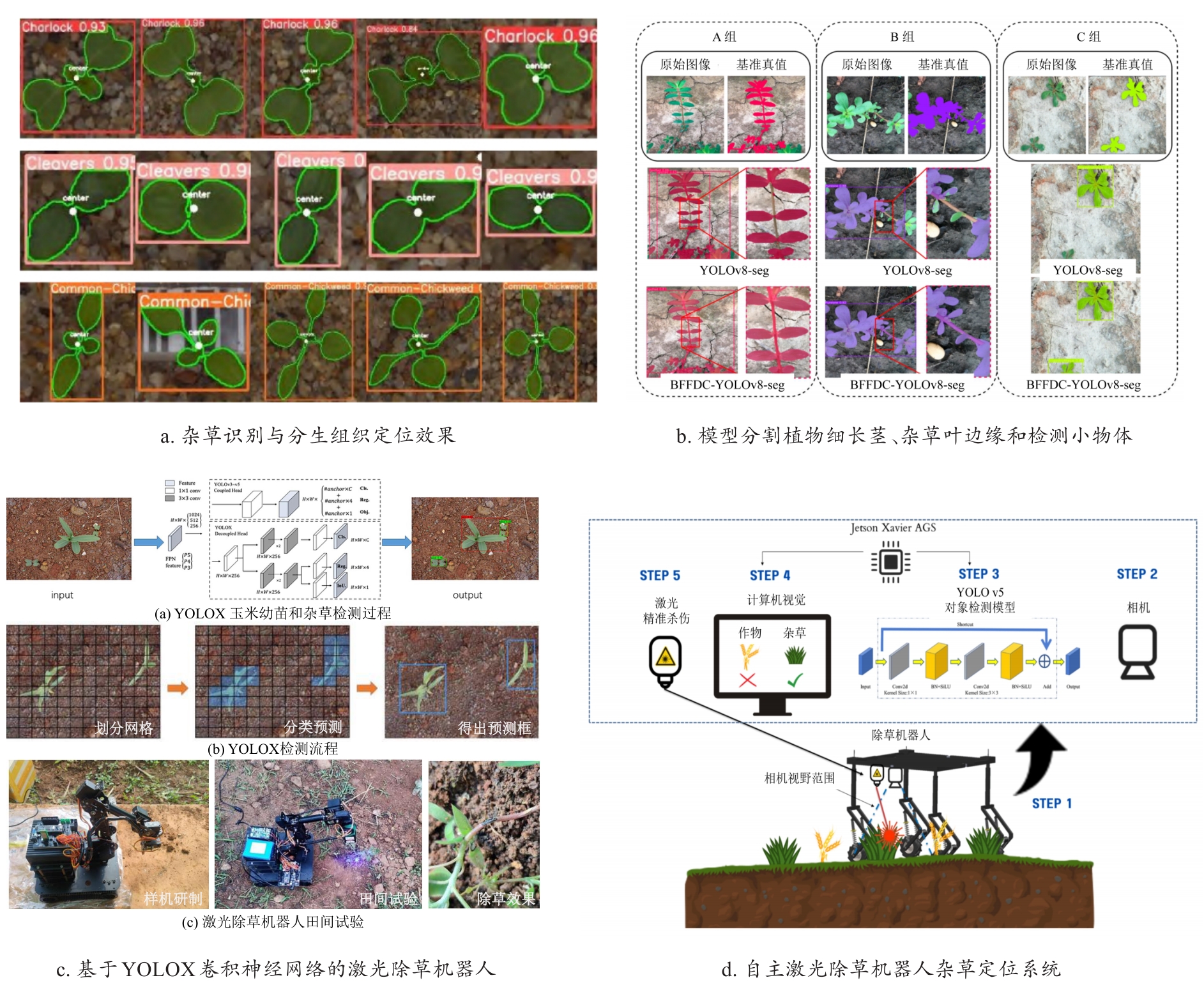
典型激光除草机器人
图13
基于深度学习的二极管激光除草机器人
注:
θ
是摄像机与垂直轴的角度;
d
是机器人到照相机的距离;
m
是相机到末端执行器的距离;
H
是照相机到地面的距离;
h
是杂草的高度。
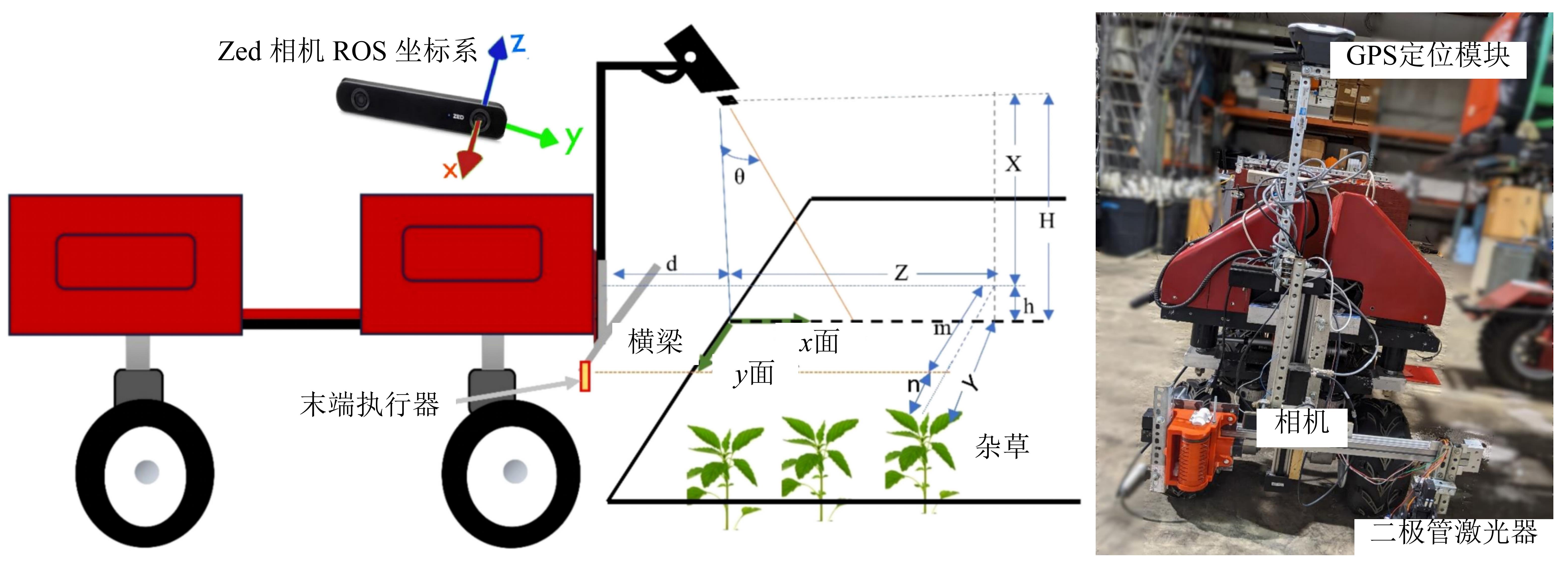
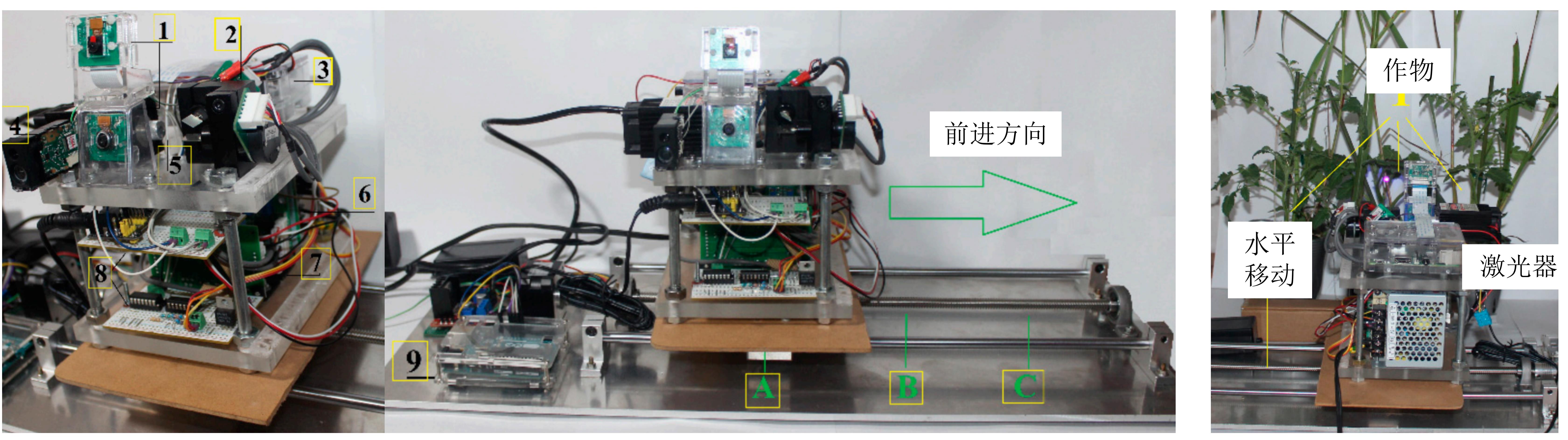
图12
激光除草装置结构与试验图
注:
1. 相机;2. 电流计;3. 计算机;4. 激光测距仪;5. 激光;6. 电源;7. 电机驱动器;8. 电子信号处理板;9. 激光装置位置控制器;A、B和C显示了作物的位置。
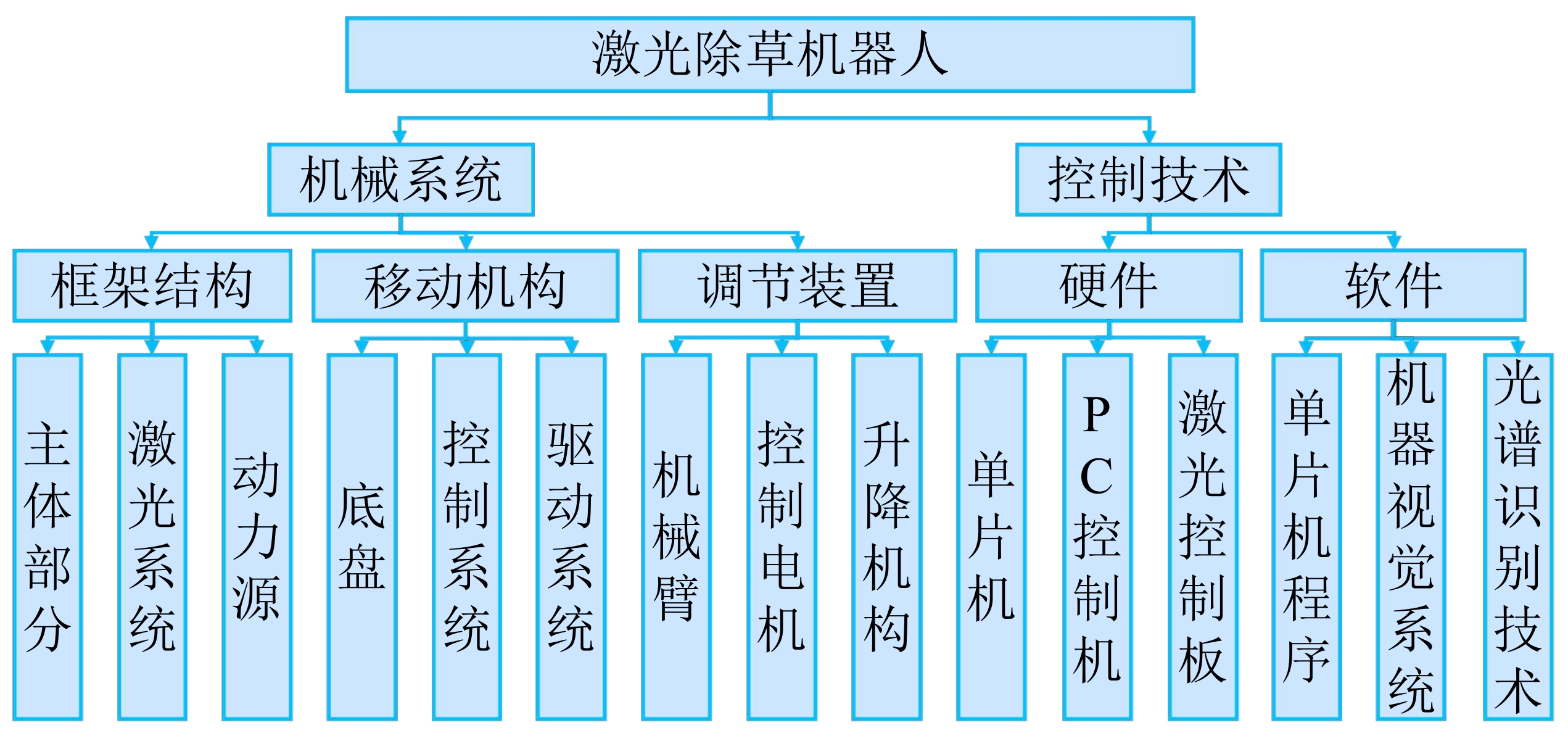
图6
激光除草机器人结构设计
图9
典型激光除草机器人的导航与路径规划
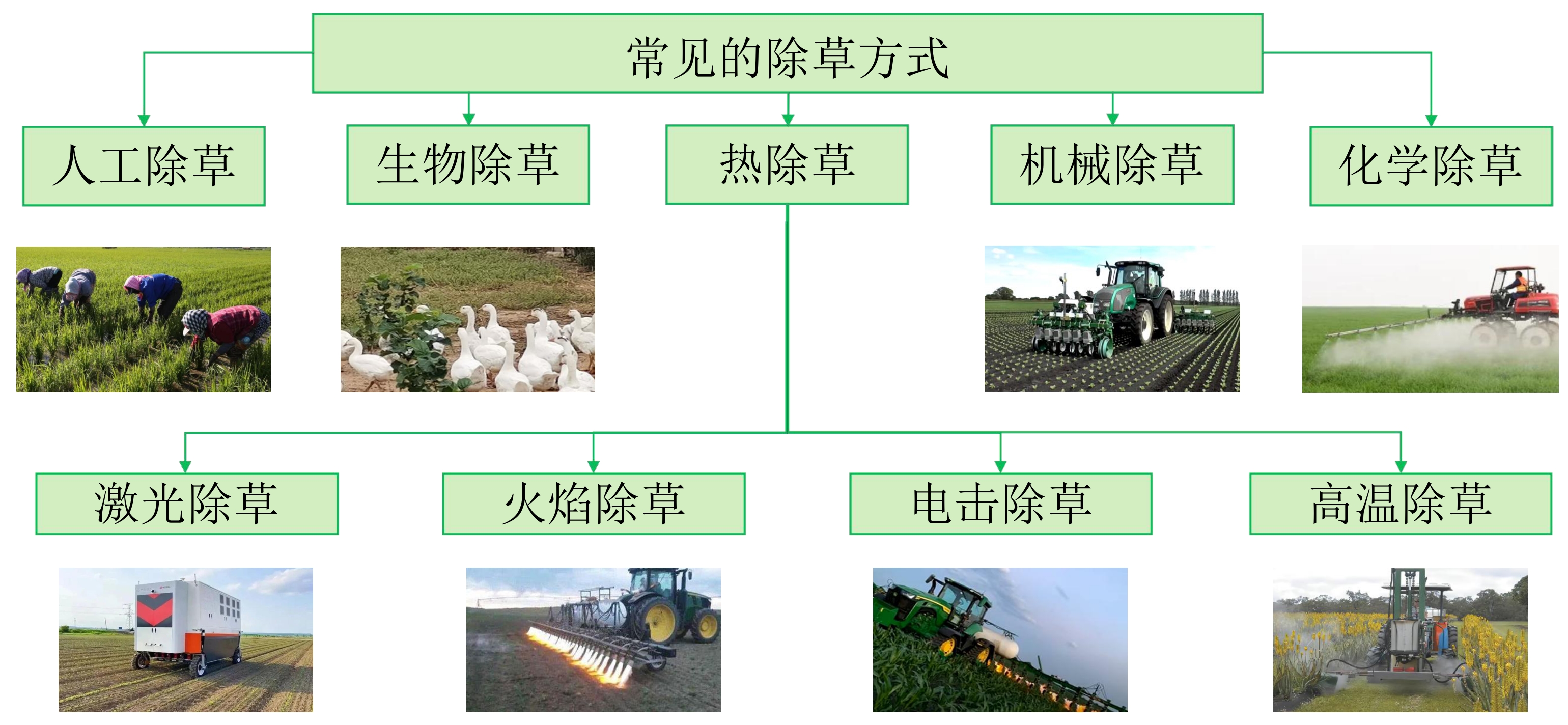
图1
常见的除草方式