| 杂草定位技术 | 原理 | 优点 | 缺点 |
|---|---|---|---|
| 静态定位 | 依赖外部基准或预先部署的基础设施(如卫星信号、固定标志物或物理轨道)实现杂草位置的精准确定,其核心是利用预先建立的坐标系统或基础设施完成绝对或相对定位 | 定位精度较高(厘米级),无需复杂环境建模,系统成本较低,抗干扰能力较强等 | 依赖卫星信号或固定基础,环境适应性差,动态障碍物处理能力弱,路径灵活性受限等 |
| 自主定位 | 通过多模态传感器实时感知环境,结合SLAM(Simultaneous Localization and Mapping)算法和惯性导航,在无需外部基准的情况下动态构建地图并估计自身位置 | 无需外部基础设施,适应复杂动态环境,路径规划灵活,具备障碍物规避能力等 | 计算资源需求高,存在累积误差(需定期校准),复杂场景下精度下降(如杂草遮挡),系统成本较高等 |
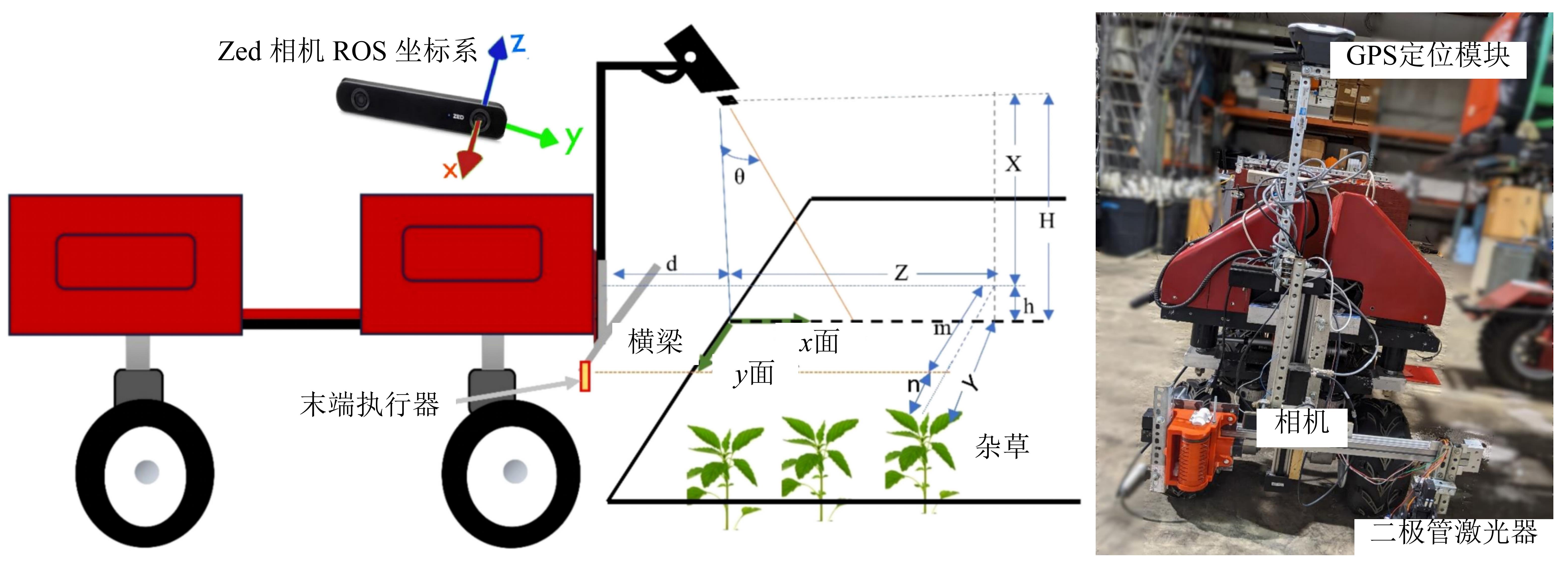
| 双目视觉定位 | 基于计算机的模仿人类双眼的视觉系统,通过使用两个摄像头从不同角度获取同一物体的图像,来计算物体在三维空间中的位置和姿态,包括图像获取、特征提取、立体匹配和深度计算等 | 非接触式测量,定位精度较高,获取三维结构、视觉信息全面,实时性较好,尤其在机器人实时避障、动态目标跟踪等方面 | 对环境要求较高,定位精度易受影响,视场范围受限,计算量大,系统标定复杂等 |
| 结构光定位 | 一种常用的三维视觉测量技术,通过向物体表面投射特定的结构光图案,然后分析反射光来获取物体的三维信息,包括结构光投射、图像采集、分析及解码 | 测量精度高、速度快,可同时获取区域三维模型信息,减少测量误差,对环境光干扰抵抗力较好 | 对物体表面材质要求高,测量范围有限,系统复杂且成本高,不适用于动态测量 |